IPMV L4 Camera Calibration
04. Camera Calibration
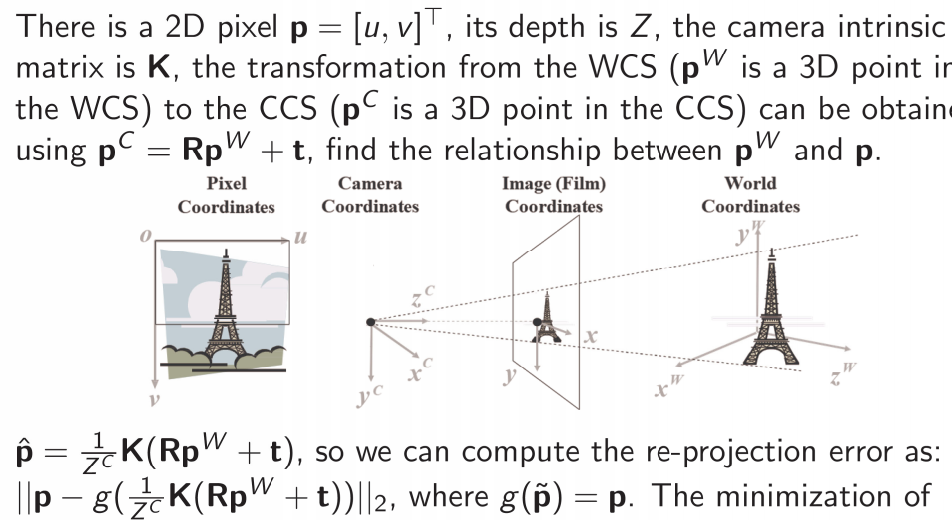
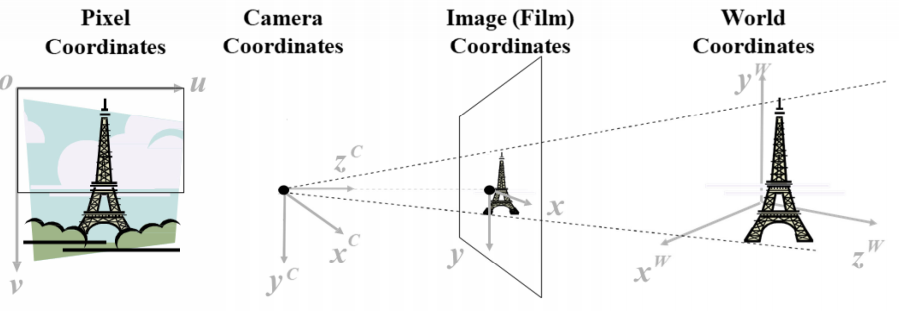
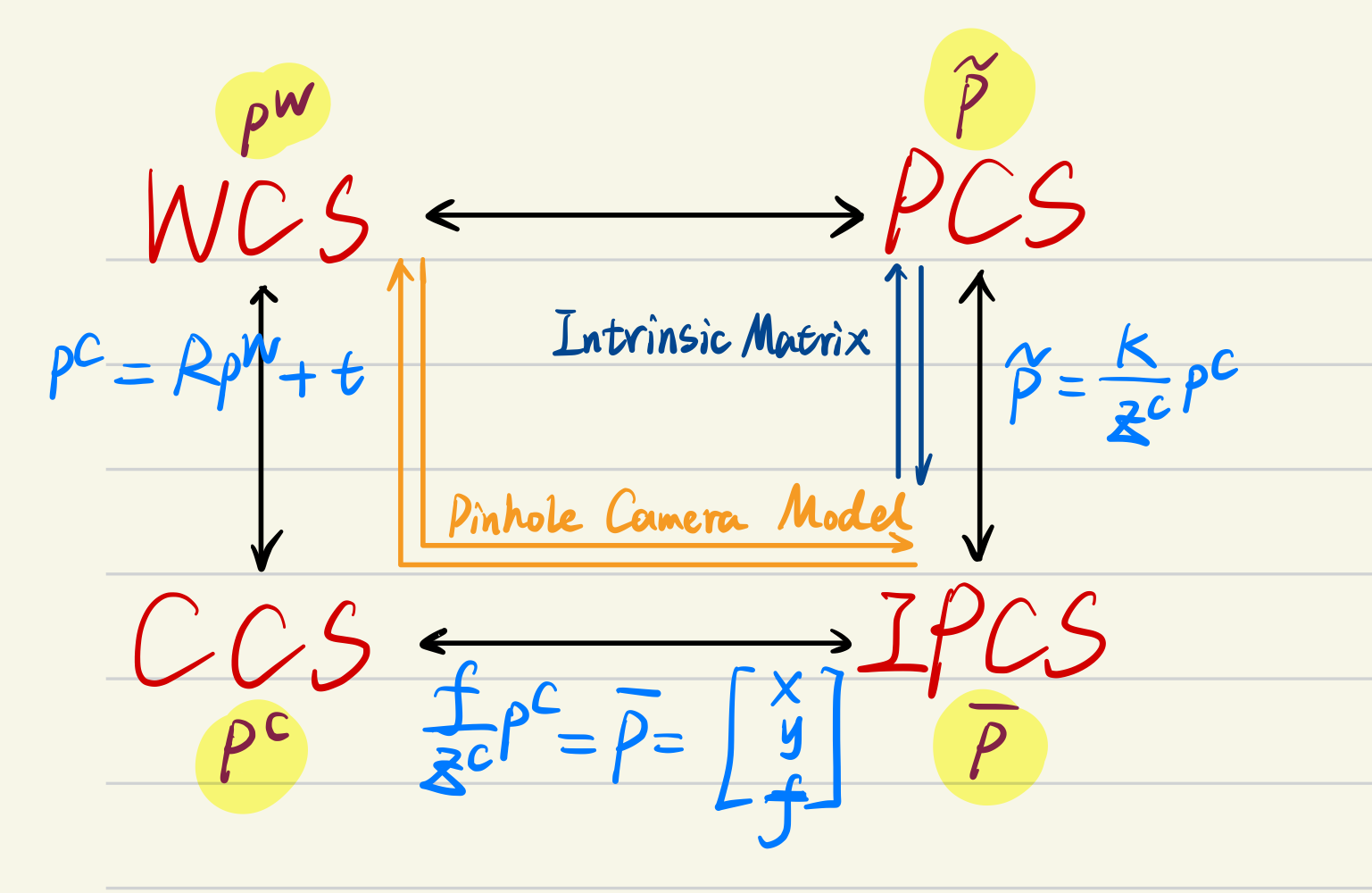
WCS. CCS. IPCS. PCS
坐标系变换关系汇总
WCS: World Coordinate System$(X^W,Y^W,Z^W)$
CCS: Camera Coordinate System$(X^C,Y^C,Z^C)$
IPCS/FCS: Image Plane Coordinate System/Film Coordinate System $(x,y)$
PCS: Pixel Coordinate System$(u,v)$
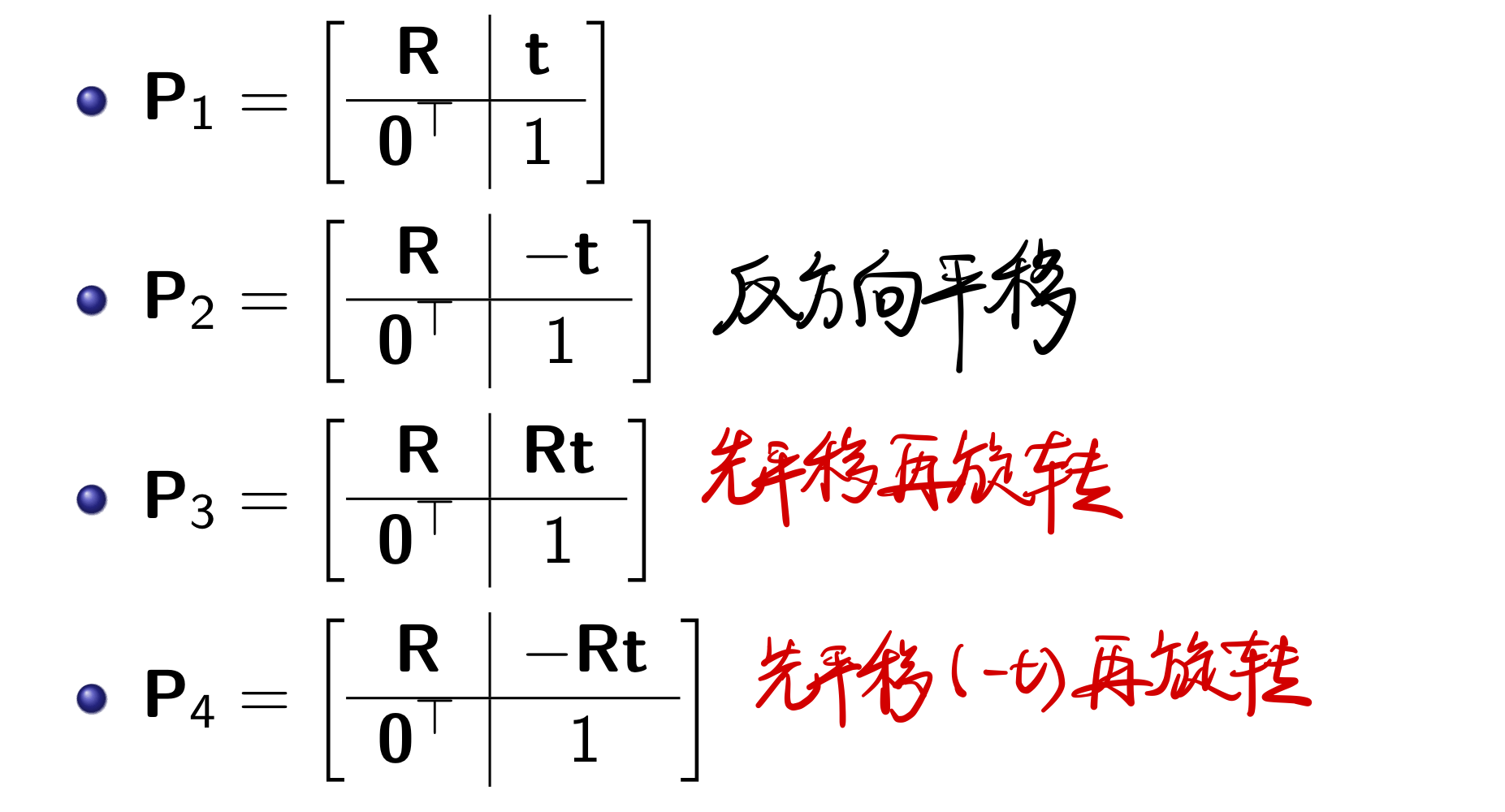
补充1:不同旋转平移方式
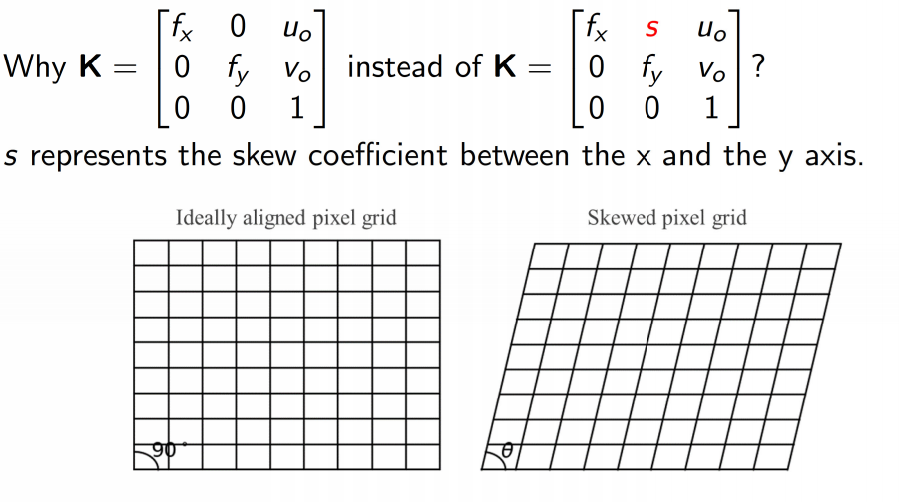
补充2:偏斜系数(skew coefficient)
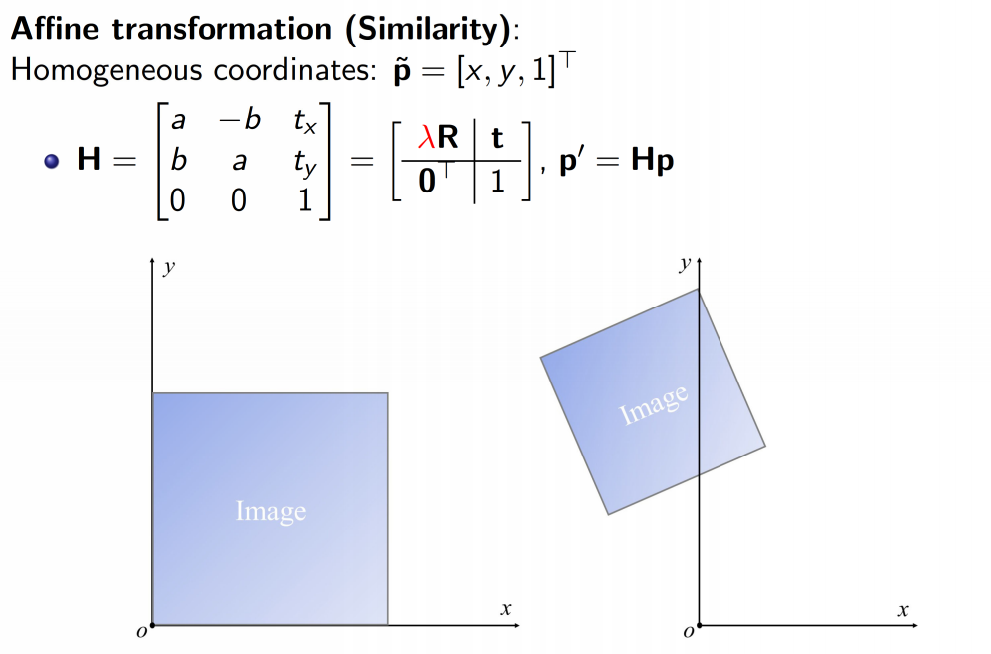
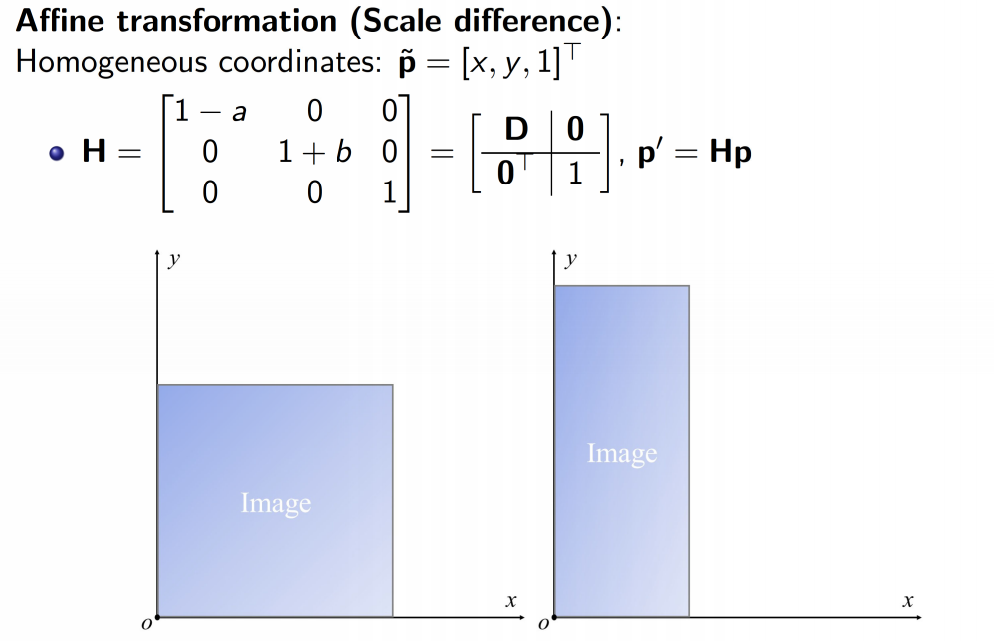
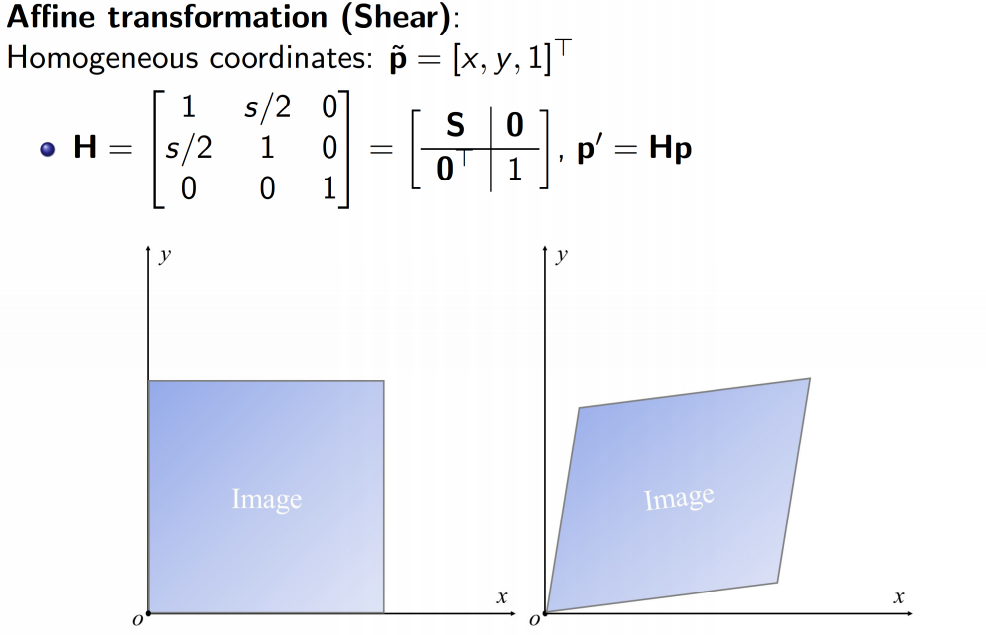
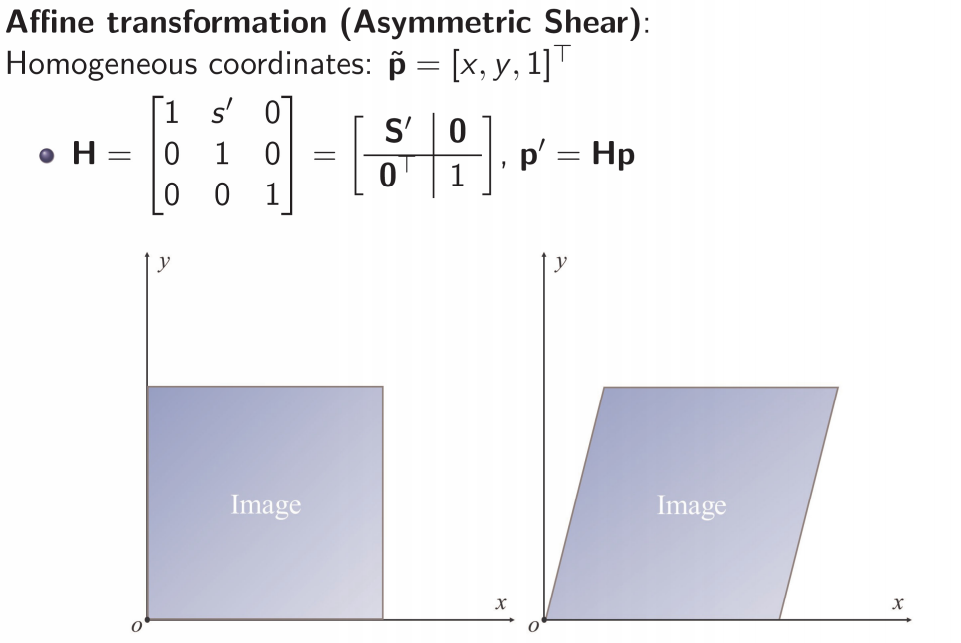
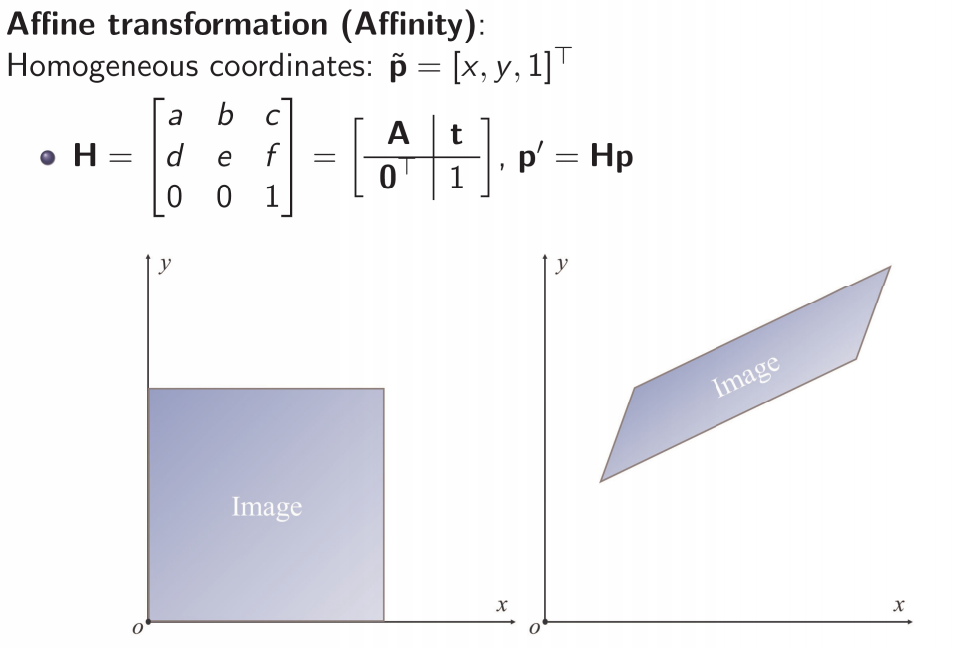
Affine transformation
Definition
通俗解释及动画演示参考:https://www.matongxue.com/madocs/244/
Affine transformation = Linear transformation + Translation
Linear transformation:
- 变换前是直线的,变换后依然是直线
- 直线比例保持不变
- 变换前是原点的,变换后依然是原点
Affine translation:
- 变换前是直线的,变换后依然是直线
- 直线比例保持不变
Examples
Homogeneous Coordinates进一步理解
Description
Homogeneous coordinates(Projective coordinates)$\leftrightarrow$Projective Geometry
(类比:Cartesian coordinates$\leftrightarrow$Euclidean Geometry)
齐次坐标空间与普通坐标空间不同!
Advantages: coordinates of points(including$\infty$) can be represented using finite coordinates
Example 1
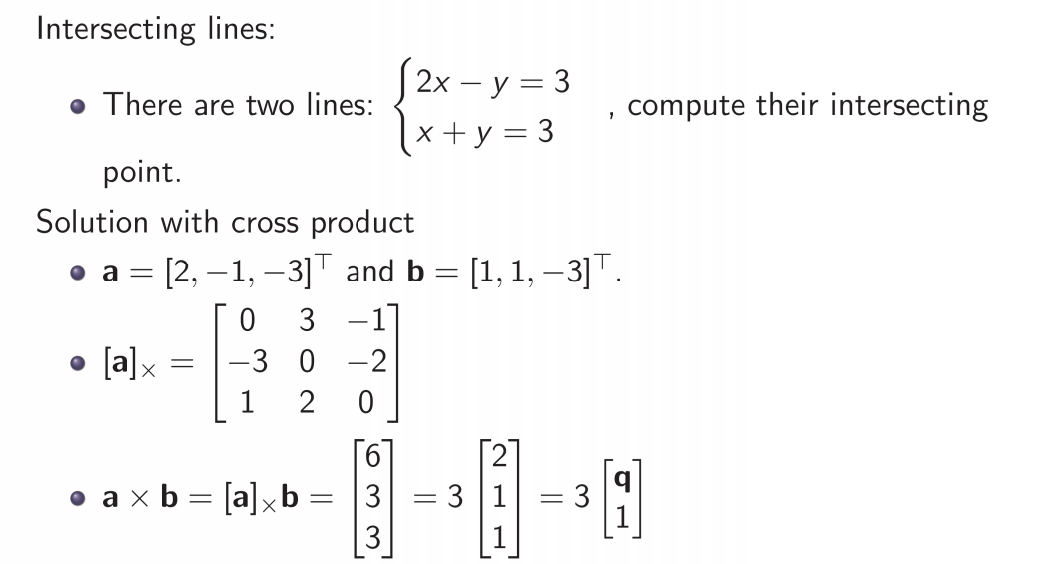
Determine the line passing through a(2,0) and b(1,3).
转化为齐次坐标,作外积得到的向量三个分量即为直线方程的系数A,B,C.
Example 2
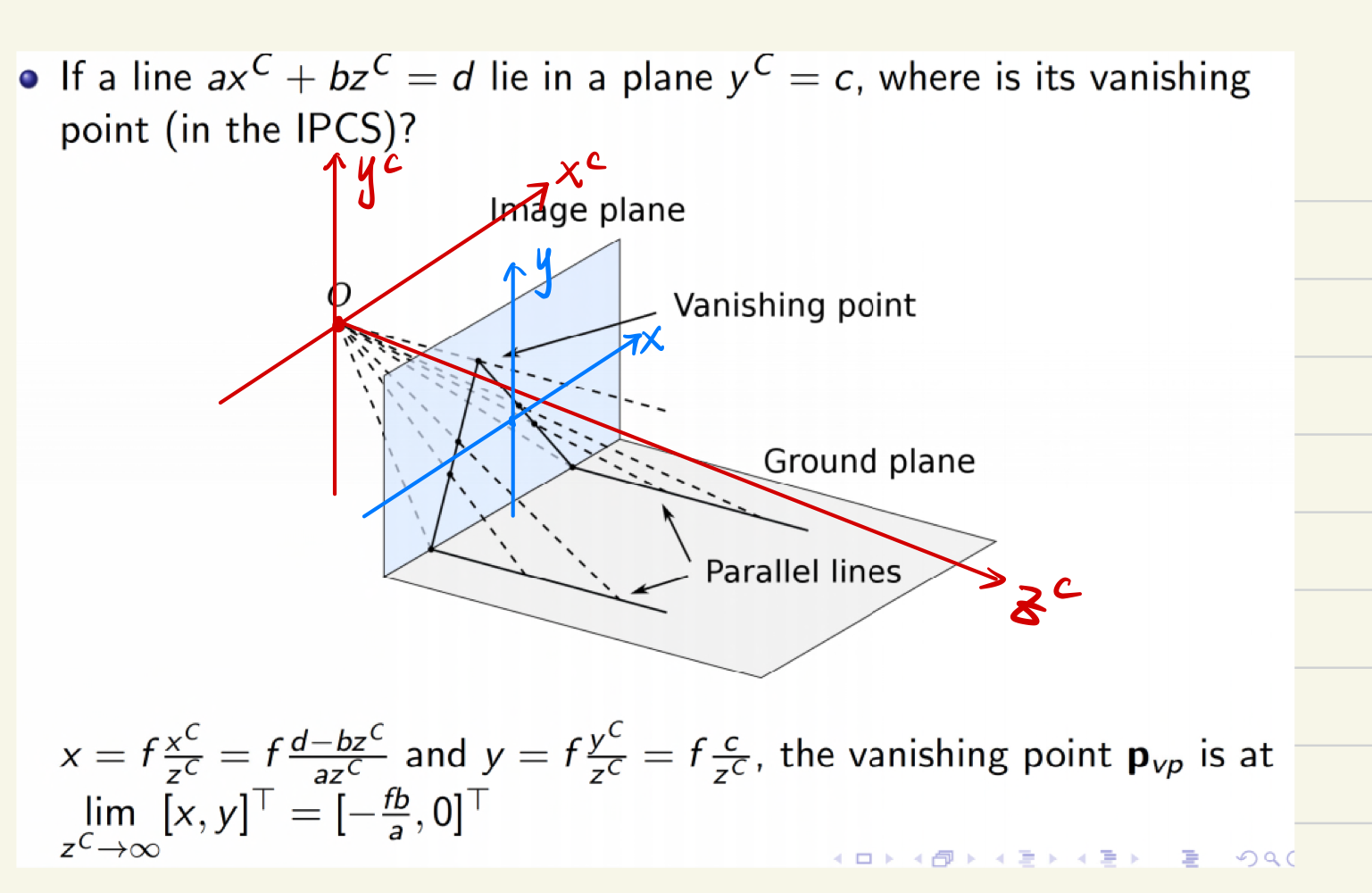
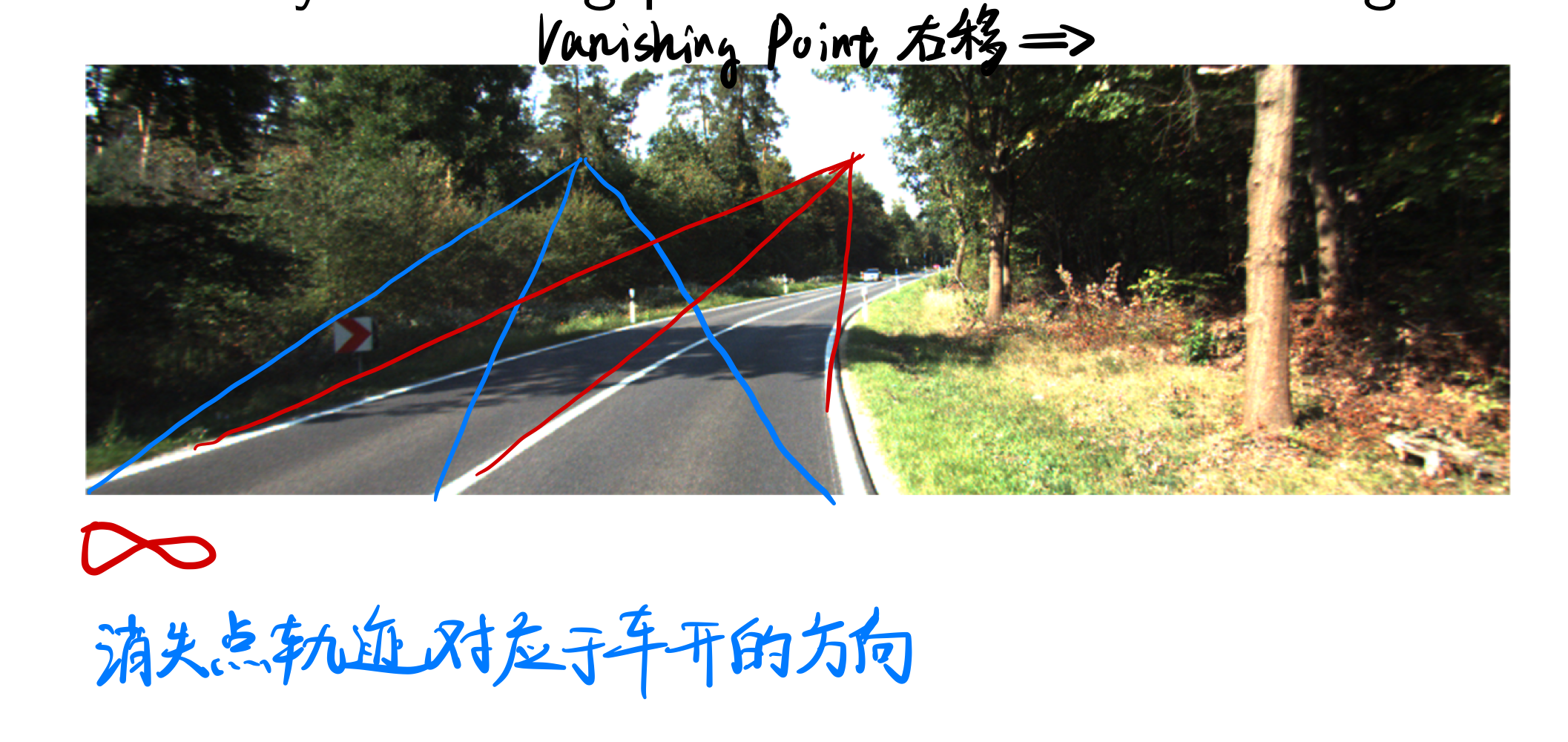
Vanishing Point(消失点)
Definition
2D perspective projections of mutually parallel in 3D space appear to converge.
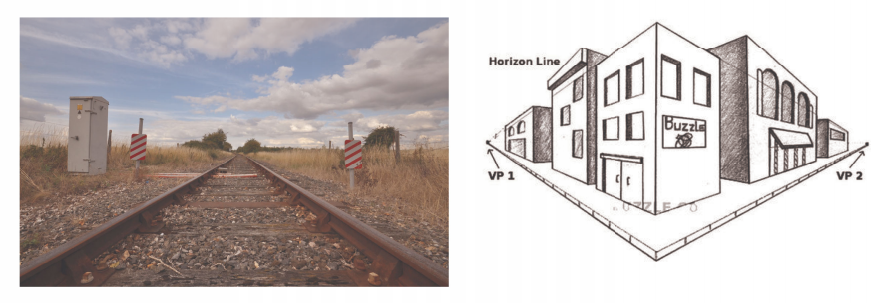
Example1
Example 2
How many vanishing points are there in the picture?

Ans: $\infty$
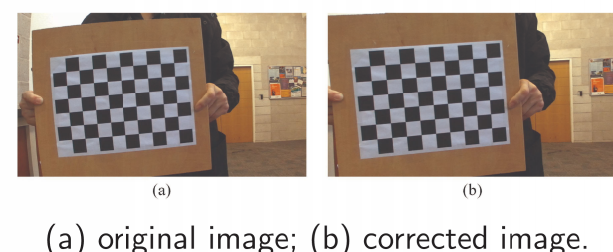
Lens distortion
Introduction
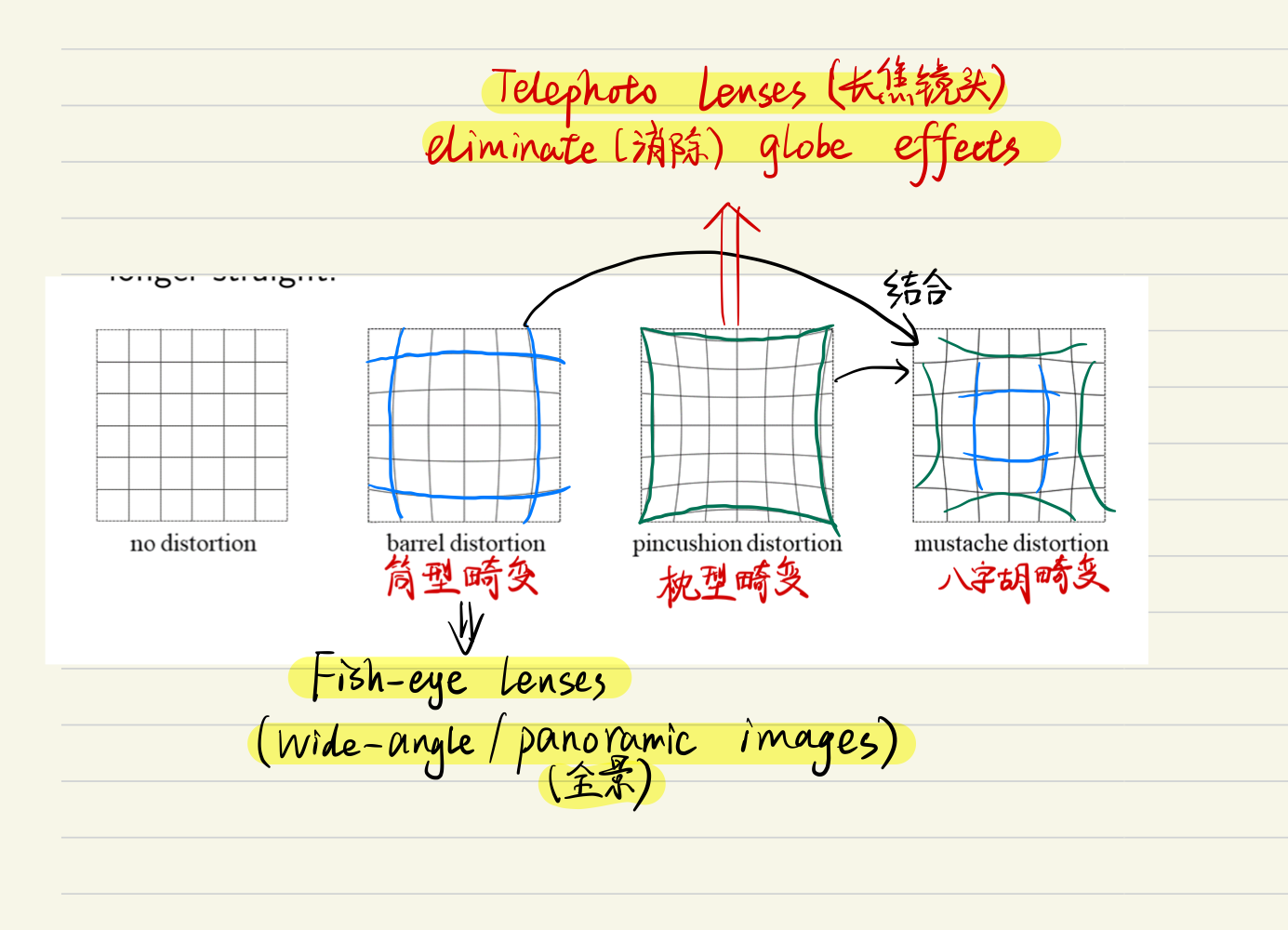
Deform the physically straight lines and makes them appear as curves in the images.
Category
1. Radial distortion(径向)
Reason: Lens’ geometric shape affects the straight line transformation.
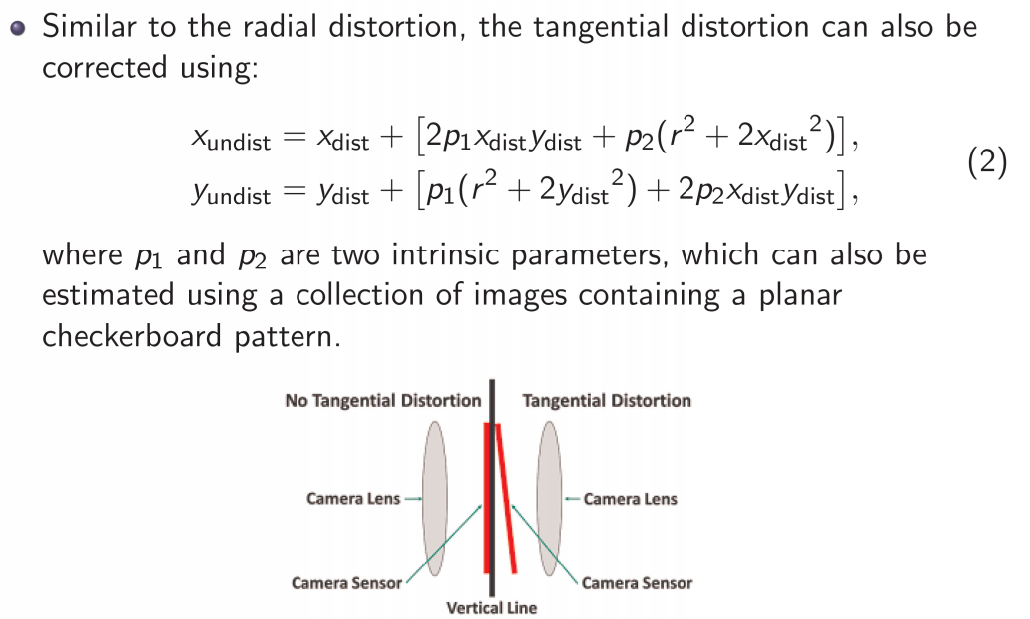
2. Tangential distortion(横向)
Reason: Lens installed in front of the camera is not perfectly parallel to the image plane.
In practical experiments, the image geometry is affected to a much higher extent with radial distortion than with tangential distortion(sometimes neglected).
Radial distortion
Classification
Calculation
$k_1,k_2,k_3$ are 3 intrinsic parameters used for radial distortion correction.
Tangential Distortion
Camera Calibration
Introduction
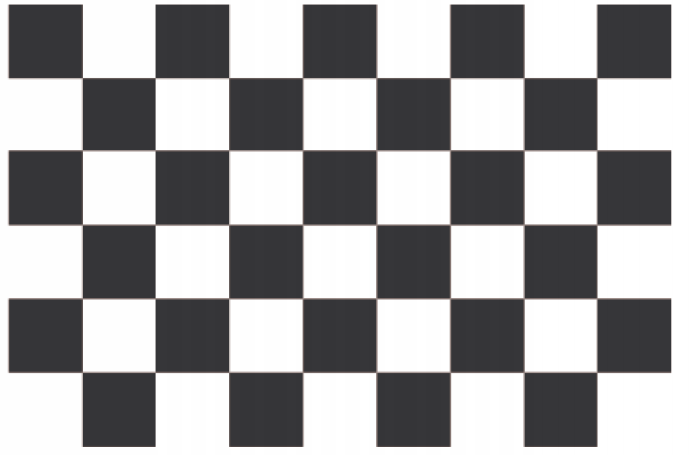
Process of estimating camera parameters by using images that contain a calibration pattern.
Camera parameters includes:
- Intrinsic matrix
- Distortion coefficients
- Extrinsic matrix
Applications:
- Remove lens distortion
- Measure planar objects
- Reconstruct 3D scenes from multiple cameras
Process
Step 1. Define real world coordinates with checkerboard pattern.
Step 2. Capture multiple images of the checkerboard from different viewpoints.

Step 3. Find 2D coordinates of the checkerboard.

Step 4. Calibrate the camera.
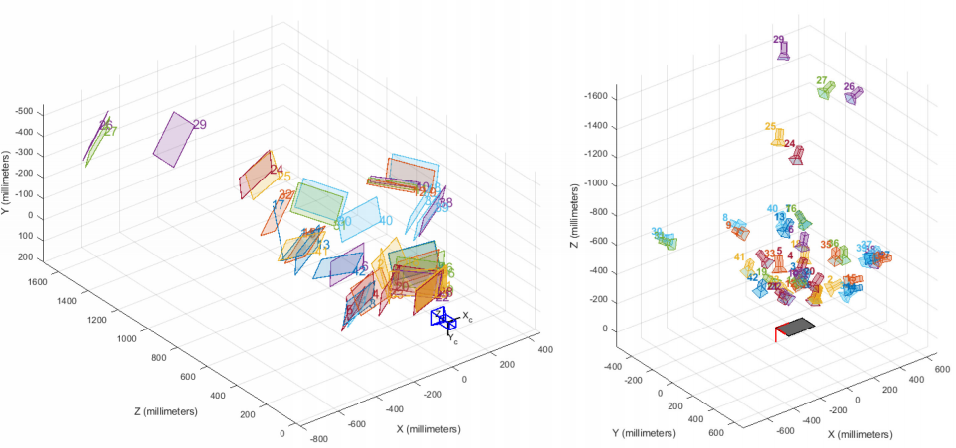
Step 5. Compute the re-projection error and refine(精制,提炼) the calibration.
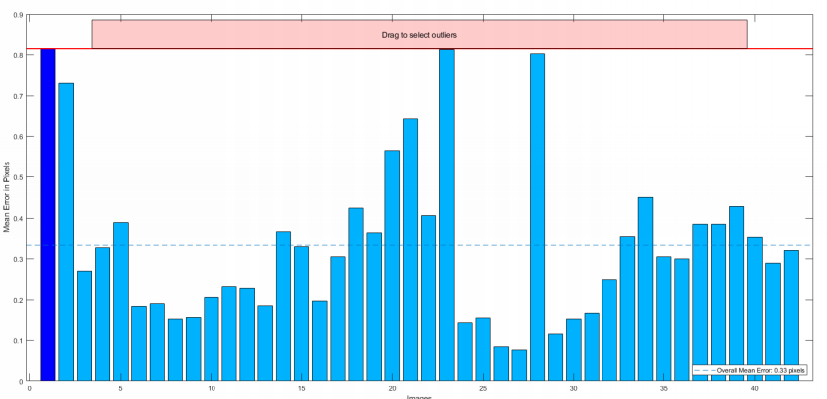
Re-projection error