降维观测器
降维观测器简介
引入
对于系统
假设其中x的维数为n,y的维数为m。
全维观测器对全部变量x进行重构。但是如果状态的某些线性组合可以直接作为输出被测量出来(这由矩阵C决定),就不需要进行估计,则可以降低其维数,仅需要额外获得n-m个维度的信息,之后配合观测得到的m个维度的信息,通过线性组合,就可以获得状态x的信息,由此引入降维观测器。
若C矩阵秩为m,则只需要重构余下的n-m个状态分量。
定义
给定线性系统$\sum(A,B,C):$
其中C为$m\times n$矩阵,假定$rank(C)=m$,则一定存在线性变换
其中D为使得$T^{-1}$存在的任意$(n-m)\times n$阵。
通过这一线性变换,系统变换为:
其中$\overline{x}_2$为m维,可以直接量测,因此只需要观测$(n-m)$维状态变量$\overline{x}_1$。
设计
为避免输出量的微分,重新定义观测器的状态
上述称为Luenberger观测器。
由此得到原系统的状态重构:
误差分析
降维观测器的测量值y通过$M_1$直接反映在状态$\hat{x}_1$上,如图所示:
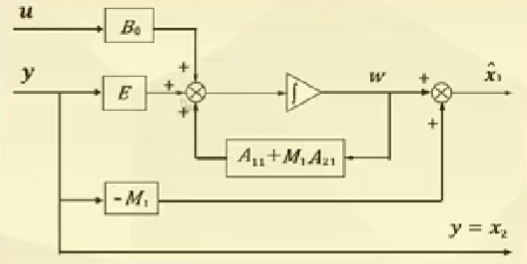
这样会将测量噪声带入,使得$M_1$的误差直接影响到$\hat{x}_1$稳态值,在全维观测器中则不存在这种误差。
降维观测器
http://example.com/2022/04/06/降维观测器/