IPMV lecture3 Perspective Transformation
03. Perspective Transformation
Preliminaries
范数
$l_p$-Norm (p范数)
Infinity Norm (无穷范数)
证明:令
又
根据夹逼定理(Squeeze Theorem)
Q.E.D.
斜对称矩阵(skew-symmetric matrix)
定义
如果一个矩阵A是方阵,并且满足
则为斜对称矩阵。
例如:
的斜对称矩阵为
性质
1.基于定义
2.消消乐性质(自己和自己的外积=0)
3.叉积
4.【还不会证明】
旋转矩阵
形式
沿着三根轴旋转的旋转矩阵依次为
性质
所有旋转矩阵组成的群称为特殊正交群(special orthogonal group, SO3)
矩阵运算
说明
以下讨论中标量(scalar)表示:
向量(Vector)表示:
矩阵(Matrix)表示(懒,没有手打):
各种求导的表示:
【待填坑】
WCS vs. CCS
WCS(World Coordinate System)可以位于任何位置
CCS(Camera Coordinate System)必须设置在相机光心
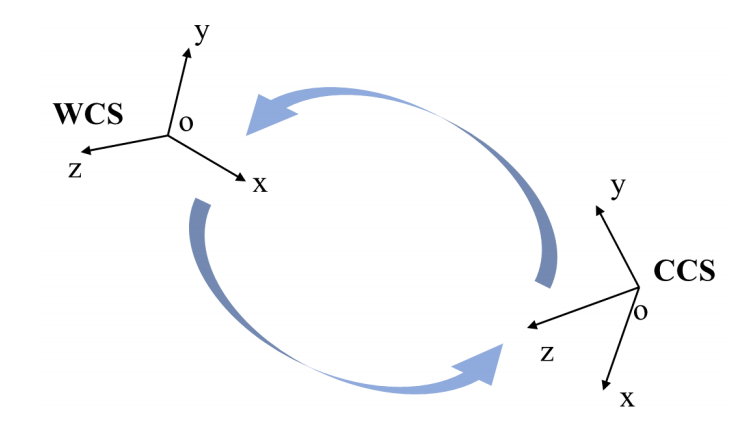
变换关系:
齐次坐标形式:
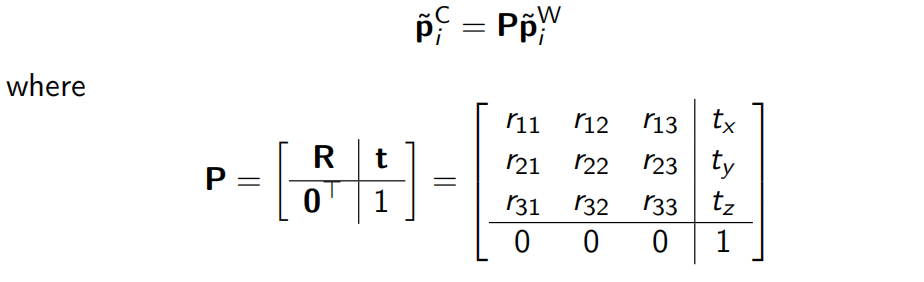
special Euclidean group(SE3): The group containing all homogeneous transformation matrices.
Pinhole camera model
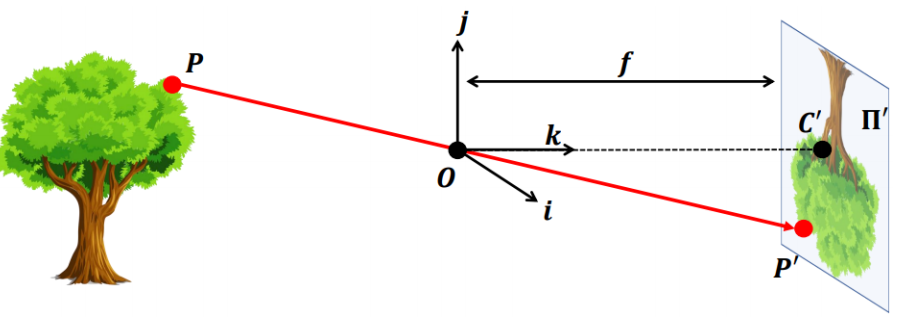
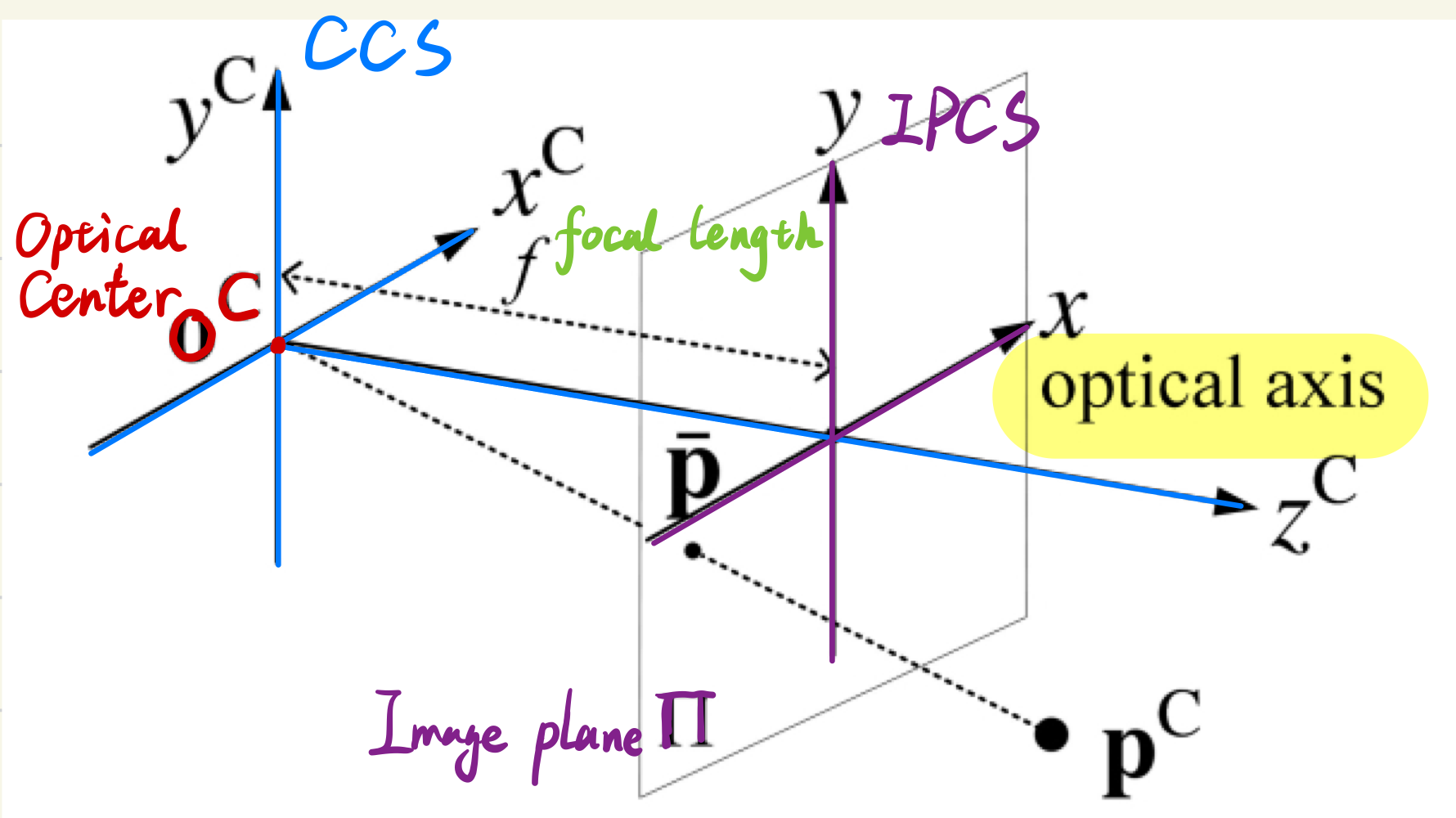
IPCS系中的坐标
重要关系
其中
是$p^C$的归一化表示(normalized).
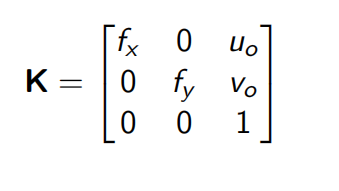
Intrinsic matrix
意义:连接image plane coordinate system && pixel coordinate system
Lens distortion does not exist in a perspective camera model.
变换关系
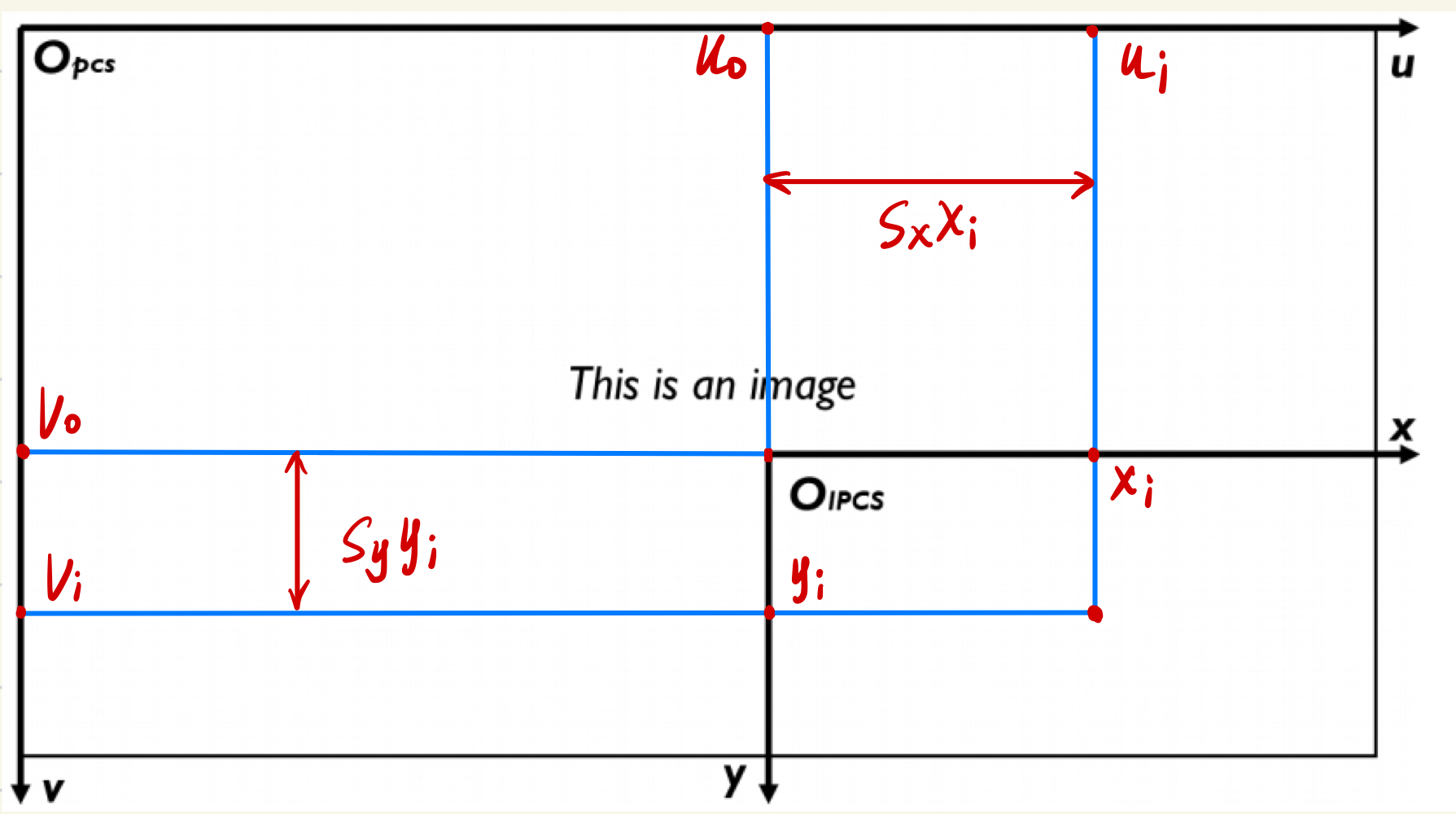
引入
$s_x,s_y$:effective size measured (in pixels per millimeter) in the horizontal and vertical directions, respectively.
可得
最终表达式
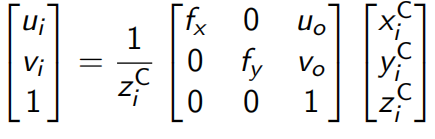
或表达为
说明:
1.$\widetilde{p}=[u_i,v_i,1]^T$是$p=[u_i,v_i]^T$的齐次坐标
2.intrinsic parameters:$u_o,v_o,f,s_x,s_y$
3.Intrinsic Matrix